
Pilnībā regulējams vārpstas sajaukts plūsmas sūknis ir vidēja un liela diametra sūkņa tips, kas izmanto asmeņa leņķa regulatoru, lai virzītu sūkņa asmeņus, lai pagrieztos, tādējādi mainot asmeņa izvietojuma leņķi, lai sasniegtu plūsmas un galvas izmaiņas. Galvenā transportējošā vide ir tīrs ūdens vai viegls notekūdeņi pie 0 ~ 50 ℃ (speciālie plašsaziņas līdzekļi ietver jūras ūdens un dzelteno upes ūdeni). To galvenokārt izmanto ūdens aizsardzības līdzekļu projektu, apūdeņošanas, kanalizācijas un ūdens novirzīšanas projektos, un to izmanto daudzos nacionālos projektos, piemēram, uz dienvidiem līdz ziemeļiem ūdens novirzīšanas projektam un Yangtze upei līdz Huaihe upes novirzīšanas projektam.
Vārpstas un jaukta plūsmas sūkņa asmeņi ir telpiski izkropļoti. Kad sūkņa darbības apstākļi novirzās no projektēšanas punkta, tiek iznīcināta attiecība starp asmeņu iekšējo un ārējo malu apkārtmēra ātrumu, kā rezultātā lāpstiņas rada asmeņi (aerodinstilijas) ar dažādiem rādiusu, kas vairs nav vienāds, tādējādi izraisot ūdens plūsmu sūknī, lai būtu turbulents un ūdens zudums palielinās; Jo tālāk no dizaina punkta, jo lielāka ir ūdens plūsmas turbulences pakāpe un jo lielāks ir ūdens zudums. Aksiālajiem un jauktajiem plūsmas sūkņiem ir zema galva un salīdzinoši šaura augstas efektivitātes zona. Viņu darba galvas maiņa izraisīs ievērojamu sūkņa efektivitātes samazināšanos. Tāpēc aksiālie un jauktie plūsmas sūkņi parasti nevar izmantot droseļvārstu, pagriešanu un citas pielāgošanas metodes, lai mainītu darba apstākļu darba veiktspēju; Tajā pašā laikā, tā kā ātruma regulēšanas izmaksas ir pārāk augstas, faktiskajā darbībā reti izmanto mainīgu ātruma regulēšanu. Tā kā aksiālajiem un jauktajiem plūsmas sūkņiem ir lielāks rumbas korpuss, ir ērti uzstādīt asmeņus un asmeņu savienojošo stieņu mehānismus ar regulējamiem leņķiem. Tāpēc aksiālās un jaukto plūsmas sūkņu darba stāvokļa regulēšana parasti pieņem mainīgu leņķa pielāgošanu, kas var likt aksiālajiem un jauktajiem plūsmas sūkņiem darboties vislabvēlīgākajos darba apstākļos.
Kad palielinās augšējā un pakārtotā ūdens līmeņa starpība (tas ir, palielinās neto galva), asmeņu izvietojuma leņķi koriģē līdz mazai vērtībai. Saglabājot salīdzinoši augstu efektivitāti, ūdens plūsmas ātrums tiek pienācīgi samazināts, lai novērstu motora pārslodzi; Kad augšējā un pakārtotā ūdens līmeņa starpība samazinās (tas ir, tīrā galva samazinās), asmeņu izvietojuma leņķi pielāgo lielākai vērtībai, lai pilnībā iekrautu motoru un ļautu ūdens sūknim sūknēt vairāk ūdens. Īsāk sakot, vārpstas un jauktu plūsmas sūkņu izmantošana, kas var mainīt asmens leņķi, var padarīt to darbību vislabvēlīgākajā darba stāvoklī, izvairoties no piespiedu izslēgšanas un sasniedzot augstu efektivitāti un augstu ūdens sūknēšanu.
Turklāt, sākot ierīci, asmeņu izvietojuma leņķi var pielāgot līdz minimumam, kas var samazināt motora sākuma slodzi (apmēram 1/3 ~ 2/3 no nominālās jaudas); Pirms izslēgšanas asmeņa leņķi var noregulēt līdz mazākai vērtībai, kas izslēgšanas laikā var samazināt ūdens plūsmas ūdens plūsmas ātrumu un ūdens daudzumu un samazināt ūdens plūsmas ietekmes bojājumus uz iekārtām.
Īsāk sakot, asmeņu leņķa pielāgošanas ietekme ir ievērojama: ① Leņķa pielāgošana mazākā vērtībā atvieglo sākšanu un izslēgšanu; ② Leņķa pielāgošana lielākai vērtībai palielina plūsmas ātrumu; ③ Leņķa pielāgošana var padarīt sūkņa vienības darbību ekonomiski. Var redzēt, ka asmens leņķa regulētājs ieņem salīdzinoši svarīgu pozīciju vidējās un lielas sūknēšanas staciju darbībā un pārvaldībā.
Pilnībā regulējama vārpstas sajaukta plūsmas sūkņa galvenais korpuss sastāv no trim daļām: sūkņa galva, regulators un motors.
1. sūkņa galva
Pilnībā regulējama aksiālā sajauktajā plūsmas sūkņa īpašais ātrums ir 400 ~ 1600 (parastais aksiālās plūsmas sūkņa specifiskais ātrums ir 700 ~ 1600) (parastais jauktā plūsmas sūkņa īpašais ātrums ir 400 ~ 800), un vispārējā galva ir 0 ~ 30,6 m. Sūkņa galva galvenokārt sastāv no ūdens ieplūdes raga (ūdens ieplūdes izplešanās savienojuma), rotora detaļām, lāpstiņriteņa kameras detaļām, vadošie lāpstiņas korpuss, sūkņa sēdeklis, elkonis, sūkņa vārpstas detaļas, iesaiņošanas detaļas utt. Ievads galvenajos komponentos:
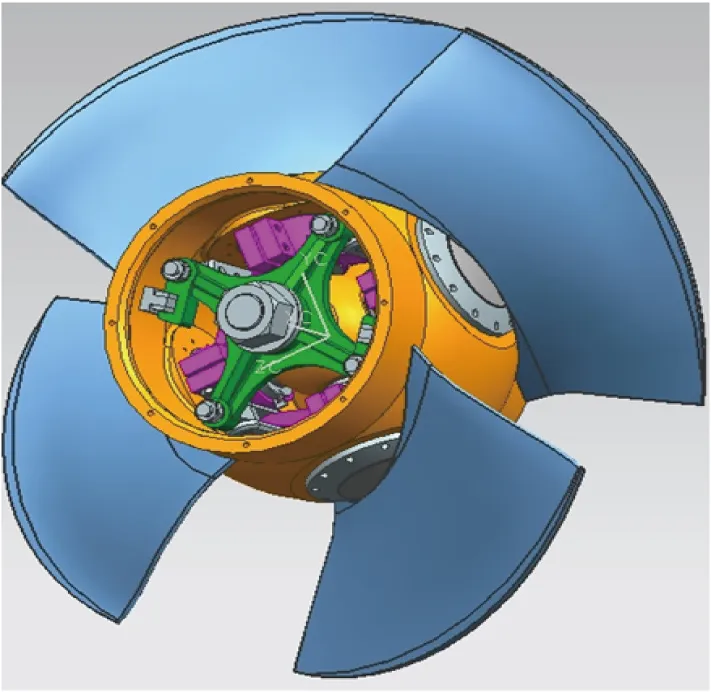
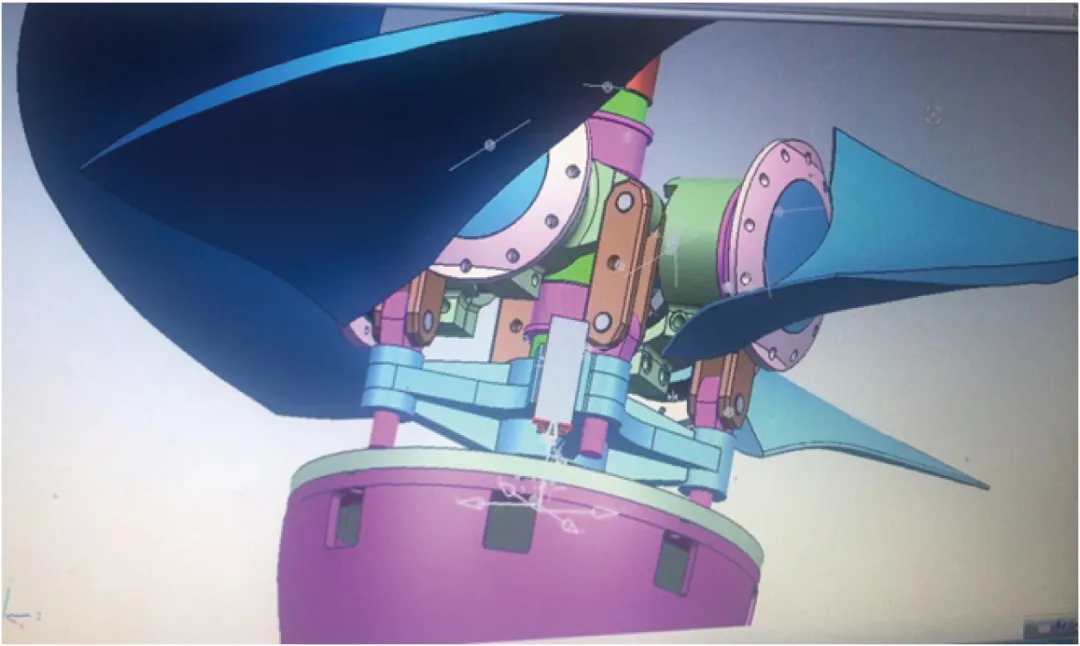
1. Rotora komponents ir serdes sastāvdaļa sūkņa galvā, kas sastāv no asmeņiem, rotora korpusa, apakšējā vilkšanas stieņa, gultņa, kloķa rokas, darbības rāmja, savienojošā stieņa un citām detaļām. Pēc vispārējās montāžas tiek veikts statiskā līdzsvara tests. Starp tiem asmens materiāls ir vēlams ZG0CR13NI4MO (augsta cietība un laba nodiluma izturība), un tiek pieņemta CNC apstrāde. Atlikušo daļu materiāls parasti galvenokārt ir Zg.
2. Lāpstiņriteņa kameras komponenti ir integrāli atvērti vidū, kas ir pievilkti ar skrūvēm un novietoti ar koniskām tapām. Vēlams, lai materiāls ir neatņemams ZG, un dažas daļas ir izgatavotas no ZG + izklāta nerūsējošā tērauda (šis šķīdums ir sarežģīts, lai ražotu un pakļautu metināšanas defektiem, tāpēc no tā jāizvairās pēc iespējas vairāk).

3. Vadītāja lāpstiņas korpuss. Tā kā pilnībā regulējamais sūknis būtībā ir vidēja vai liela kalibra sūknis, tiek ņemtas vērā liešanas, ražošanas izmaksu un citu aspektu grūtības. Parasti vēlamais materiāls ir ZG+Q235B. Vadītāja lāpstiņa tiek ielikta vienā gabalā, un apvalka atloks ir Q235B tērauda plāksne. Abas ir metinātas un pēc tam apstrādātas.

4. Sūkņa vārpsta: pilnībā regulējams sūknis parasti ir doba vārpsta ar atloku konstrukcijām abos galos. Vēlams, lai materiāls ir kalts 45 + apšuvums 30CR13. Aptveršana pie ūdens vadotnes gultņa un pildvielas galvenokārt ir, lai palielinātu tās cietību un uzlabotu nodiluma izturību.

二. Ievads regulatora galvenajās sastāvdaļās
Iebūvēto asmeņu leņķa hidraulisko regulatoru galvenokārt izmanto šodien tirgū. Tas galvenokārt sastāv no trim daļām: rotējoša korpusa, pārseguma un vadības displeja sistēmas kaste.

1. Rotējošais korpuss: rotējošais korpuss sastāv no atbalsta sēdekļa, cilindra, degvielas tvertnes, hidrauliskās strāvas blokiem, leņķa sensora, barošanas avota slīdēšanas gredzena utt.
Viss rotējošais korpuss tiek novietots uz galvenā motora vārpstas un griežas sinhroni ar vārpstu. Tas ir pieskrūvēts galvenās motora vārpstas augšpusē caur montāžas atloku.
Montāžas atloks ir savienots ar atbalsta sēdekli.
Leņķa sensora mērīšanas punkts ir uzstādīts starp virzuļa stieni un kaklasaites stieņa piedurkni, un leņķa sensors ir uzstādīts ārpus eļļas cilindra.
Barošanas avota slīdēšanas gredzens ir uzstādīts un fiksēts uz eļļas tvertnes pārsega, un tā rotējošā daļa (rotors) griežas sinhroni ar rotējošo korpusu. Rotora izejas gals ir savienots ar hidraulisko jaudas bloku, spiediena sensoru, temperatūras sensoru, leņķa sensoru un ierobežojuma slēdzi; Barošanas avota slīdēšanas gredzena statora daļa ir savienota ar apturēšanas skrūvi uz vāka, un statora izeja ir savienota ar regulatora vāka termināli;
Virzuļa stienis ir pieskrūvēts uzūdens sūkniskaklasaites stienis.
Hidrauliskā jaudas vienība atrodas eļļas tvertnes iekšpusē, kas nodrošina jaudu eļļas cilindra darbībai.
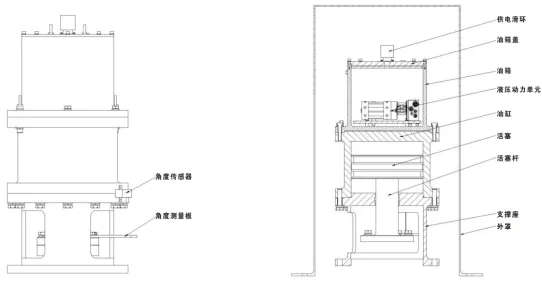
Regulatora pacelšanas laikā uz eļļas tvertnes ir uzstādīti divi celšanas gredzeni.
2. Pārklājums (saukts arī par fiksētu virsbūvi): tas sastāv no trim daļām. Viena daļa ir ārējais vāks; Otrā daļa ir vāka vāks; Trešā daļa ir novērošanas logs. Ārējais vāks ir uzstādīts un piestiprināts galvenā motora ārējā pārsega augšdaļā, lai pārklātu rotējošo virsbūvi.
3. Vadības displeja sistēmas lodziņš (kā parādīts 3. attēlā): tas sastāv no PLC, skārienekrāna, releja, kontaktora, līdzstrāvas barošanas avota, pogas, indikatora gaismas utt. Skārienekrāns var parādīt strāvas asmeņa leņķi, laiku, eļļas spiedienu un citus parametrus. Vadības sistēmai ir divas funkcijas: vietējā vadība un tālvadības pults. Divi vadības režīmi tiek ieslēgti caur vadības displeja sistēmas lodziņa divu pozīciju pogu (saukts par “vadības displeja lodziņu”, tas pats zemāk).
三. Sinhrono un asinhrono motoru salīdzinājums un atlase
A. Sinhrono motoru priekšrocības un trūkumi
Priekšrocības:
1. Gaisa sprauga starp rotoru un stator ir liela, un uzstādīšana un pielāgošana ir ērta.
2. Gluda darbība un spēcīga pārslodzes jauda.
3. Ātrums nemainās ar slodzi.
4. Augsta efektivitāte.
5. Jaudas koeficientu var uzlabot. Reaktīvo jaudu var nodrošināt enerģijas tīklam, tādējādi uzlabojot enerģijas tīkla kvalitāti. Turklāt, ja jaudas koeficients tiek pielāgots 1 vai tuvu tam, ampēra rādījums samazināsies, pateicoties reaktīvās komponenta samazināšanai strāvā, kas nav iespējams asinhronajiem motoriem.
Trūkumi:
1. Rotors jāiesniedz ar īpašu ierosmes ierīci.
2. Izmaksas ir augstas.
3. Apkope ir sarežģītāka.
B. Asinhrono motoru priekšrocības un trūkumi
Priekšrocības:
1. Rotoram nav jābūt savienotam ar citiem enerģijas avotiem.
2. Vienkārša struktūra, viegls svars un zemas izmaksas.
3. Viegla apkope.
Trūkumi:
1. Reaktīvā jauda jāizvelk no strāvas režģa, kas pasliktina jaudas tīkla kvalitāti.
2. Gaisa sprauga starp rotoru un statoru ir maza, un uzstādīšana un pielāgošana ir neērta.
C. Motoru izvēle
Motoru izvēle ar novērtētu jaudu 1000kW un nominālais ātrums 300R/min jānosaka, pamatojoties uz tehniskiem un ekonomiskiem salīdzinājumiem atbilstoši īpašiem nosacījumiem.
1. Ūdens aizsardzības nozares nozarē, kad uzstādītā jauda parasti ir mazāka par 800 kW, priekšroka tiek dota asinhroniskajiem motoriem un, kad uzstādītā jauda ir lielāka par 800 kW, sinhronie motori mēdz izvēlēties.
2. Galvenā atšķirība starp sinhronajiem motoriem un asinhronajiem motoriem ir tā, ka rotoram ir ierosinājums, un ir jākonfigurē tiristora ierosmes ekrāns.
3. Manas valsts barošanas avota departaments nosaka, ka enerģijas koeficientam lietotāja barošanas avotā jāsasniedz 0,90 vai vairāk. Sinhronajiem motoriem ir augstas jaudas koeficients un tie var izpildīt barošanas avota prasības; Kaut arī asinhronajiem motoriem ir maz jaudas koeficients un tie nevar izpildīt enerģijas padeves prasības, un ir nepieciešama reaktīva kompensācija. Tāpēc sūkņu stacijas, kas aprīkotas ar asinhroniem motoriem, parasti ir jāaprīko ar reaktīvo kompensācijas ekrāniem.
4. Sinhrono motoru struktūra ir sarežģītāka nekā asinhronā motoru struktūra. Ja sūkņa stacijas projektam jāņem vērā gan enerģijas ražošana, gan fāzes modulācija, jāizvēlas sinhronais motors.
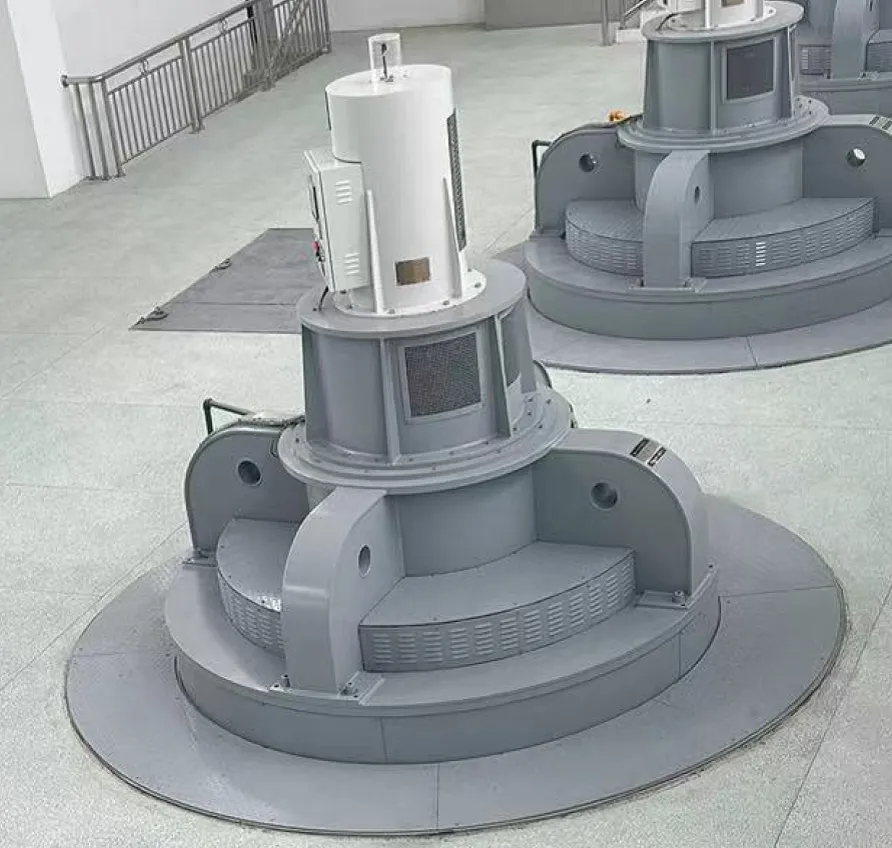
Pilnībā regulējami aksiāli sajaukti plūsmas sūkņi tiek plaši izmantotivertikālas vienības(ZLQ, HLQ, ZLQK),horizontālās (slīpas) vienības(ZWQ, ZXQ, ZGQ), un to var izmantot arī zemas pacelšanas un liela diametra LP vienībās.
Pasta laiks: 20.-2024. Aug.