
משאבת הזרימה המעורבת של הפיר המתכוונן לחלוטין היא סוג משאבה בקוטר בינוני וגדול המשתמש בתשנית זווית להב כדי להניע את להבי המשאבה לסיבוב, ובכך משנה את זווית מיקום הלהב כדי להשיג שינויי זרימה ושינוי ראש. המדיום המשנה העיקרי הוא מים נקיים או ביוב קל ב 0 ~ 50 ℃ (מדיה מיוחדת כוללת מי ים ומים נהר צהוב). הוא משמש בעיקר בתחומי פרויקטים של שימור מים, השקיה, ניקוז והסחת מים, ומשמש בפרויקטים לאומיים רבים כמו פרויקט הסחת המים של דרום לצפון ונהר יאנגצה לפרויקט הסחת נהר הואי.
להבי הפיר ומשאבת הזרימה המעורבת מעוותים במרחב. כאשר תנאי ההפעלה של המשאבה חורגים מנקודת העיצוב, היחס בין המהירות ההיקפית של הקצוות הפנימיים והחיצוניים של הלהבים נהרס, וכתוצאה מכך המעלית שנוצרת על ידי הלהבים (חניכי אוויר) ברדיוסים שונים כבר לא שווים, ובכך גורמים לזרימת המים בסוערת והפסד המים להגדיל; ככל שהרחק מנקודת העיצוב, כך גדלה מידת סערת זרימת המים ואובדן המים גדול יותר. למשאבות הזרימה הצירית והמעורבת יש ראש נמוך ואזור יעיל גבוה יחסית. שינוי ראש העבודה שלהם יגרום להפחתה משמעותית ביעילות המשאבה. לפיכך, משאבות זרימה ציריות ומעורבות בדרך כלל אינן יכולות להשתמש בשיטות מצערת, סיבוב ובתאמת אחרות כדי לשנות את ביצועי העבודה של תנאי ההפעלה; יחד עם זאת, מכיוון שעלות ויסות המהירות גבוהה מדי, לעתים רחוקות משתמשים בוויסות מהירות משתנה בפעולה בפועל. מכיוון שמשאבות זרימה ציריות ומעורבות יש גוף רכזת גדול יותר, נוח להתקין להבים ומנגנוני מוט חיבור להב עם זוויות מתכווננות. לפיכך, התאמת מצב העבודה של משאבות זרימה ציריות ומעורבות בדרך כלל מאמצת התאמת זווית משתנה, שיכולה לגרום למשאבות הזרימה הציריות והמעורבות לפעול בתנאי העבודה החיוביים ביותר.
כאשר ההבדל במעלה הזרם והמוגד של המים במורד הזרם עולה (כלומר הראש נטו גדל), זווית מיקום הלהב מותאמת לערך קטן יותר. תוך שמירה על יעילות גבוהה יחסית, קצב זרימת המים מופחת כראוי כדי למנוע את העומס יתר על המנוע; כאשר ההבדל במעלה הזרם והמתפלל מפלס המים יורד (כלומר, הראש נטו פוחת), זווית מיקום הלהב מותאמת לערך גדול יותר כדי להעמיס את המנוע באופן מלא ולאפשר למשאבת המים לשאוב יותר מים. בקיצור, השימוש במוט ומשאבות זרימה מעורבות שיכולות לשנות את זווית הלהב יכול לגרום לו לפעול במצב העבודה החיובי ביותר, להימנע מכאבות כפויה ולהשיג יעילות גבוהה ושאיבת מים גבוהה.
בנוסף, כאשר מתחילה היחידה, ניתן להתאים את זווית מיקום הלהב למינימום, מה שיכול להפחית את עומס ההתחלה של המנוע (בערך 1/3 ~ 2/3 של הכוח המדורג); לפני כיבוי, ניתן לכוונן את זווית הלהב לערך קטן יותר, שיכול להפחית את מהירות הזרימה האחורית ואת נפח המים של זרימת המים במשאבה במהלך הכיבוי, ולהפחית את נזק ההשפעה של זרימת המים על הציוד.
בקיצור, ההשפעה של התאמת זווית הלהב משמעותית: ① התאמת הזווית לערך קטן יותר מקלה על התחלה וסגירה; ② התאמת הזווית לערך גדול יותר מגדילה את קצב הזרימה; ③ התאמת הזווית יכולה לגרום ליחידת המשאבה להפעיל כלכלית. ניתן לראות כי שמאי זווית הלהב תופס עמדה חשובה יחסית בהפעלה וניהול של תחנות שאיבה בינוניות וגדולות.
הגוף העיקרי של משאבת הזרימה המעורבת של הפיר המתכוונן לחלוטין מורכב משלושה חלקים: ראש המשאבה, הרגולטור והמנוע.
1. ראש משאבה
המהירות הספציפית של משאבת הזרימה המעורבת הצירית המתכווננת לחלוטין היא 400 ~ 1600 (המהירות הספציפית המקובלת של משאבת הזרימה הצירית היא 700 ~ 1600), (המהירות הספציפית המקובלת של משאבת הזרימה המעורבת היא 400 ~ 800), והראש הכללי הוא 0 ~ 30.6 מ '. ראש המשאבה מורכב בעיקר מקרן כניסת המים (מפרק התפשטות כניסת מים), חלקי רוטור, חלקי תא אימפלר, גוף שמיר מדריך, מושב משאבה, מרפק, חלקי פיר משאבה, חלקי אריזה וכו '. מבוא לרכיבי מפתח:
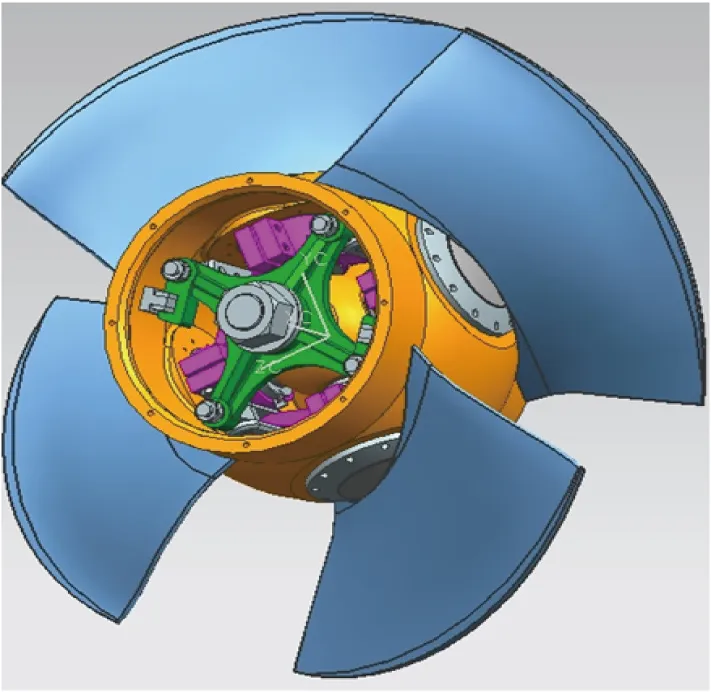
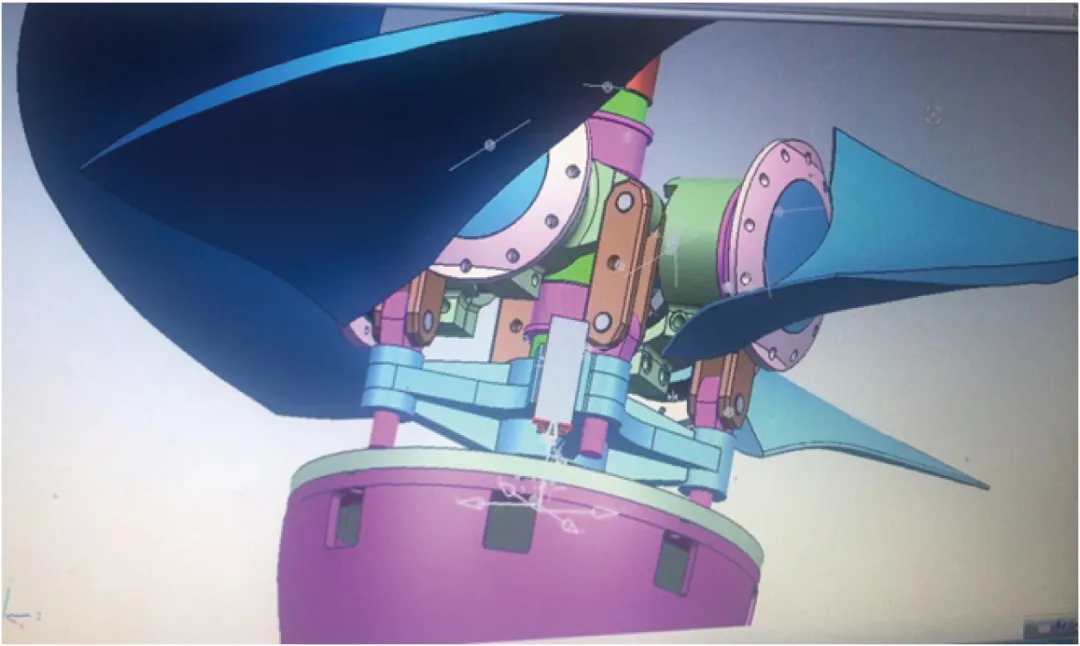
1. רכיב הרוטור הוא רכיב הליבה בראש המשאבה, המורכב מלהבים, גוף הרוטור, מוט משיכה תחתון, מיסב, זרוע כננת, מסגרת הפעלה, מוט חיבור וחלקים אחרים. לאחר המכלול הכולל, מבוצעת בדיקת איזון סטטי. ביניהם, חומר הלהב עדיף ZG0CR13NI4MO (קשיות גבוהה ועמידות בלאי טוב), ומאמצת עיבוד CNC. החומר של שאר החלקים הוא בדרך כלל בעיקר ZG.
2. רכיבי תא האימפלר נפתחים באופן אינטגרלי באמצע, המותקנים בברגים וממוקמים בעזרת סיכות חרוטי. החומר עדיף ZG אינטגרלי, וחלקים מסוימים עשויים מפלדת אל חלד מרופדת ZG + (פיתרון זה מורכב לייצור ומועדים למומים ריתוכים, ולכן יש להימנע ממנו ככל האפשר).

3. מדריך גוף השבון. מכיוון שהמשאבה הניתנת להתאמה מלאה היא בעצם משאבה בינונית עד גדולה, נלקחים בחשבון הקושי של יציקה, עלות ייצור והיבטים אחרים. באופן כללי, החומר המועדף הוא ZG+Q235B. שבט המדריך מושלך בחתיכה אחת, ואוגן הקליפה הוא צלחת פלדה Q235B. השניים מרותכים ואז מעובדים.

4 פיר משאבה: המשאבה הניתנת להתאמה מלאה היא בדרך כלל פיר חלול עם מבני אוגן בשני הקצוות. החומר עדיף מזויף 45 + חיפוי 30cr13. החיפוי במיסב מדריך המים ומילוי הוא בעיקר להגביר את קשיותו ולשפר את עמידות בלאי.

二. מבוא למרכיבים העיקריים של הרגולטור
הווסת ההידראולי המובנה של הלהב המובנה משמש בעיקר בשוק כיום. זה מורכב בעיקר משלושה חלקים: סיבוב גוף, כיסוי ותיבת תצוגה בקרה.

1. גוף מסתובב: הגוף המסתובב מורכב ממושב תמיכה, צילינדר, מיכל דלק, יחידת כוח הידראולית, חיישן זווית, טבעת החלקה של אספקת חשמל וכו '.
כל הגוף המסתובב מונח על פיר המנוע הראשי ומסתובב באופן סינכרוני עם הפיר. הוא מבורג לראש פיר המנוע הראשי דרך אוגן ההרכבה.
אוגן ההרכבה מחובר למושב התומך.
נקודת המדידה של חיישן הזווית מותקנת בין מוט הבוכנה לשרוול מוט העניבה, וחיישן הזווית מותקן מחוץ לצילינדר השמן.
טבעת החלקה של אספקת החשמל מותקנת ומוקדמת על כיסוי מיכל השמן, והחלק המסתובב שלו (הרוטור) מסתובב באופן סינכרוני עם הגוף המסתובב. סוף הפלט ברוטור מחובר ליחידת ההספק ההידראולית, חיישן הלחץ, חיישן הטמפרטורה, חיישן זווית ומתג הגבלה; החלק הסטטורי של טבעת החלקה של אספקת החשמל מחובר לבורג העצירה שעל הכיסוי, ושקע הסטטור מחובר לטרמינל בכיסוי הרגולטור;
מוט הבוכנה מבורג למשאבת מיםמוט עניבה.
יחידת הכוח ההידראולית נמצאת בתוך מיכל השמן, המספקת כוח לפעולה של צילינדר השמן.
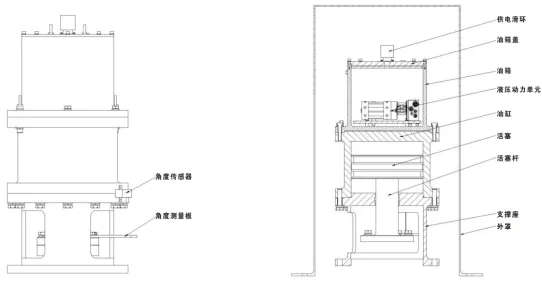
ישנן שתי טבעות הרמה המותקנות על מיכל השמן לשימוש בעת הרמת הרגולטור.
2. כיסוי (נקרא גם גוף קבוע): הוא מורכב משלושה חלקים. חלק אחד הוא הכיסוי החיצוני; החלק השני הוא כיסוי הכיסוי; החלק השלישי הוא חלון התצפית. הכיסוי החיצוני מותקן ומתוקן בחלקו העליון של הכיסוי החיצוני של המנוע הראשי לכיסוי הגוף המסתובב.
3. תיבת מערכת תצוגת בקרה (כפי שמוצג באיור 3): היא מורכבת מ- PLC, מסך מגע, ממסר, מגע, אספקת חשמל DC, ידית, אור מחוון וכו '. מסך המגע יכול להציג את זווית הלהב הנוכחית, זמן, לחץ שמן ופרמטרים אחרים. למערכת הבקרה שתי פונקציות: שליטה מקומית ושלט רחוק. שני מצבי הבקרה מועברים דרך כפתור הדו-מיקום בתיבת מערכת תצוגת הבקרה (המכונה "תיבת תצוגת בקרה", זהה למטה).
三. השוואה ובחירת מנועים סינכרוניים ואסינכרוניים
א. יתרונות וחסרונות של מנועים סינכרוניים
יתרונות:
1. פער האוויר בין הרוטור לסטטור גדול, וההתקנה וההתאמה נוחות.
2. פעולה חלקה ויכולת עומס יתר חזקה.
3. המהירות לא משתנה עם העומס.
4. יעילות גבוהה.
5. ניתן להתקדם את גורם ההספק. ניתן לספק כוח תגובתי לרשת החשמל, ובכך לשפר את איכות רשת הכוח. בנוסף, כאשר גורם ההספק מותאם ל -1 או קרוב אליו, הקריאה על הדגמת תקטן בגלל צמצום הרכיב המגיב בזרם, שאי אפשר למנועים אסינכרוניים.
חסרונות:
1. הרוטור צריך להיות מופעל על ידי מכשיר עירור ייעודי.
2. העלות גבוהה.
3. התחזוקה מסובכת יותר.
ב. יתרונות וחסרונות של מנועים אסינכרוניים
יתרונות:
1. הרוטור אינו צריך להיות מחובר למקורות כוח אחרים.
2. מבנה פשוט, משקל קל ועלות נמוכה.
3. תחזוקה קלה.
חסרונות:
1. יש לשאוב כוח תגובתי מרשת הכוח, אשר מתדרדרת באיכות רשת הכוח.
2. פער האוויר בין הרוטור לסטטור קטן, וההתקנה וההתאמה אינם נוחים.
ג. בחירת מנועים
יש לקבוע את בחירת המנועים עם כוח מדורג של 1000kW ומהירות מדורגת של 300R/MIN על סמך השוואה טכנית וכלכלית בהתאם לתנאים ספציפיים.
1. בענף שמירת המים, כאשר הקיבולת המותקנת בדרך כלל מתחת ל 800 קילוואט, עדיפים מנועים אסינכרוניים, וכאשר הקיבולת המותקנת גדולה מ- 800 קילוואט, מנועים סינכרוניים נוטים להיבחר.
2. ההבדל העיקרי בין מנועים סינכרוניים למנועים אסינכרוניים הוא שיש עירור המתפתל על הרוטור, וצריך להגדיר מסך עירור של תיריסטור.
3. מחלקת אספקת החשמל של המדינה שלי קובעת כי גורם הכוח באספקת החשמל של המשתמש חייב להגיע ל 0.90 ומעלה. מנועים סינכרוניים הם בעלי גורם כוח גבוה ויכולים לעמוד בדרישות אספקת החשמל; בעוד שלמנועים אסינכרוניים יש גורם כוח נמוך ואינם יכולים לעמוד בדרישות אספקת החשמל, ונדרש פיצוי תגובתי. לפיכך, בדרך כלל צריכות להיות מצוידות בתחנות משאבה המצוידות במנועים אסינכרוניים במסכי פיצוי תגוביים.
4. מבנה המנועים הסינכרוניים מורכב יותר מזה של מנועים אסינכרוניים. כאשר פרויקט תחנת משאבה צריך לקחת בחשבון גם ייצור חשמל וגם אפנון שלב, יש לבחור מנוע סינכרוני.
משאבות זרימה מעורבות מתכווננות לחלוטין משמשות בשימוש נרחב ביחידות אנכיות(ZLQ, HLQ, ZLQK),יחידות אופקיות (נוטות)(ZWQ, ZXQ, ZGQ), וניתן להשתמש בהן גם ביחידות LP עם הרמה נמוכה ובקוטר גדול.
זמן ההודעה: אוגוסט 30-2024