
Լրիվ կարգավորելի լիսեռի խառնուրդի պոմպը միջին եւ մեծ տրամագծի պոմպի տեսակ է, որն օգտագործում է սայրի անկյունային կարգավորիչ `պոմպի շեղբերով պտտվելու համար, դրանով իսկ փոխելով շեղբերային տեղաբաշխման անկյունը: Հիմնական փոխանցման միջոցը մաքուր ջուր է կամ թեթեւ կոյուղի 0 ~ 50 ℃ (Հատուկ լրատվամիջոցները ներառում են ծովային եւ դեղին գետի ջուր): Այն հիմնականում օգտագործվում է ջրային պահպանողական նախագծերի, ոռոգման, ջրահեռացման եւ ջրային դիվերսիոն նախագծերի բնագավառներում եւ օգտագործվում է բազմաթիվ ազգային նախագծերում, ինչպիսիք են Հարավ-հյուսիս ջրային դիվերսիոն նախագիծը եւ Յանգտե գետը դեպի Հուայե գետի դիվերսիոն նախագիծ:
Լիսեռի եւ խառը հոսքի պոմպի շեղբերները տարածականորեն աղավաղվում են: Երբ պոմպի գործառնական պայմանները շեղվում են դիզայնի կետից, շեղբերների ներքին եւ արտաքին եզրերի շրջանցման արագության միջեւ հարաբերակցությունը ոչնչացվում է տարբեր ռադիի մեջ գտնվող շեղբերով (օդային բռունցքով) առաջացած վերամբարձը, դրանով իսկ ջրի հոսքը մեծանում է. Դիզայնի կետից ավելի հեռու, այնքան ավելի մեծ է ջրի հոսքի տուրբուլենտության աստիճանը եւ ավելի մեծ ջրի կորուստը: Քեքիալ եւ խառը հոսքի պոմպերը ունեն ցածր գլուխ եւ համեմատաբար նեղ բարձրորակ գոտի: Նրանց աշխատանքային պետի փոփոխությունը կբերի պոմպի արդյունավետության զգալի նվազում: Հետեւաբար, առանցքային եւ խառը հոսքի պոմպերը, ընդհանուր առմամբ, չեն կարող օգտագործել շնչափող, շրջադարձային եւ այլ ճշգրտման մեթոդներ `գործառնական պայմանների աշխատանքային կատարումը փոխելու համար. Միեւնույն ժամանակ, քանի որ արագության կարգավորման արժեքը չափազանց բարձր է, փոփոխական արագության կարգավորումը հազվադեպ է օգտագործվում իրական գործողության մեջ: Քանի որ առանցքային եւ խառը հոսքի պոմպերը ունեն ավելի մեծ հանգույցի մարմին, հարմար է տեղադրել շեղբեր եւ շեղբեր միացնող գավազան մեխանիզմներ կարգավորելի անկյուններով: Հետեւաբար, առանցքային եւ խառը հոսքի պոմպերի աշխատանքային պայմանը սովորաբար ընդունում է փոփոխական անկյունային ճշգրտում, որը կարող է դարձնել առանցքային եւ խառը հոսքի պոմպերը գործող առավել բարենպաստ պայմաններում:
Երբ ջրի մակարդակի հոսանքը եւ հոսանքն աճում են (այսինքն, ցանցի ցանցը մեծանում է), Blade տեղաբաշխման անկյունը ճշգրտվում է ավելի փոքր արժեքի: Համեմատաբար բարձր արդյունավետություն պահպանելիս, ջրի հոսքի արագությունը պատշաճ կերպով կրճատվում է `շարժիչը գերբեռնվածությունից կանխելու համար. Երբ ջրի մակարդակի վերեւում եւ հոսանքը նվազում է (այսինքն `գլխին նվազում է), սայրի տեղադրման անկյունը հարմարեցված է ավելի մեծ արժեքի վրա` շարժիչը լիարժեք բեռնելու համար եւ ջրի պոմպը թույլ կտա ավելի շատ ջուր խմել: Մի խոսքով, լիսեռի եւ խառը հոսքի պոմպերի օգտագործումը, որը կարող է փոխել Blade անկյունը, կարող է այն գործարկել առավել բարենպաստ աշխատող վիճակում, խուսափելով հարկադիր անջատումից եւ բարձր արդյունավետության եւ բարձրորակ պոմպի հասնելուց:
Բացի այդ, երբ միավորը սկսվում է, սայրի տեղադրման անկյունը կարող է ճշգրտվել նվազագույնի, որը կարող է նվազեցնել շարժիչի մեկնարկային բեռը (գնահատված հզորության մոտ 1/3 ~ 2/3). Անջատվելուց առաջ, բերանի անկյունը կարող է ճշգրտվել ավելի փոքր արժեքի, որը կարող է նվազեցնել պոմպում ջրի հոսքի արագությունն ու ջրի ծավալը, որը փակվում է սարքավորումների վրա ջրի հոսքի ազդեցության վնասը:
Մի խոսքով, Blade Angle- ի ճշգրտման հետեւանքը նշանակալի է. ② Անկյունը ավելի մեծ արժեքի կարգավորելը մեծացնում է հոսքի մակարդակը. ③ Անկյունը կարգավորելը կարող է պոմպային միավորը գործարկել տնտեսապես: Կարելի է տեսնել, որ սայրի անկյան կարգավորիչը զբաղեցնում է համեմատաբար կարեւոր դիրք, միջին եւ մեծ պոմպակայանների շահագործման եւ կառավարման մեջ:
Ամբողջովին կարգավորելի լիսեռի խառնուրդի պոմպի հիմնական մարմինը բաղկացած է երեք մասից, պոմպի գլուխը, կարգավորիչը եւ շարժիչը:
1. Պոմպի գլուխ
Լրիվ կարգավորելի առանցքային խառնուրդի պոմպի հատուկ արագությունը 400 ~ 1600 է (առանցքային հոսքի պոմպի սովորական հատուկ արագությունը 700 ~ 1600 է), (խառը հոսքի պոմպի սովորական հատուկ արագությունը 400 ~ 800 է): Պոմպի գլուխը հիմնականում բաղկացած է ջրային մուտքի եղջյուրից (ջրի մուտքի ընդլայնում համատեղ), ռոտորային մասեր, պղնձի պալատի մասեր, ուղեցույց վանե նստատեղ, արմունկ, պոմպի լիսեռ մասեր, փաթեթավորման մասեր եւ այլն:
1: Ռոտորի բաղադրիչը պոմպի գլխի հիմնական բաղադրիչն է, որը բաղկացած է շեղբերից, ռոտորային մարմնից, ստորին քաշքշող ձող, կրող, կռունկ եւ այլ մասեր: Ընդհանուր հավաքից հետո կատարվում է ստատիկ հաշվեկշռի թեստ: Դրանց թվում, բերանային նյութը գերադասելի է zg0cr13ni4mmo (բարձր կարծրություն եւ հագնում դիմադրություն), եւ ընդունվում է CNC հաստոցներ: Մնացած մասերի նյութը հիմնականում հիմնականում zg է:
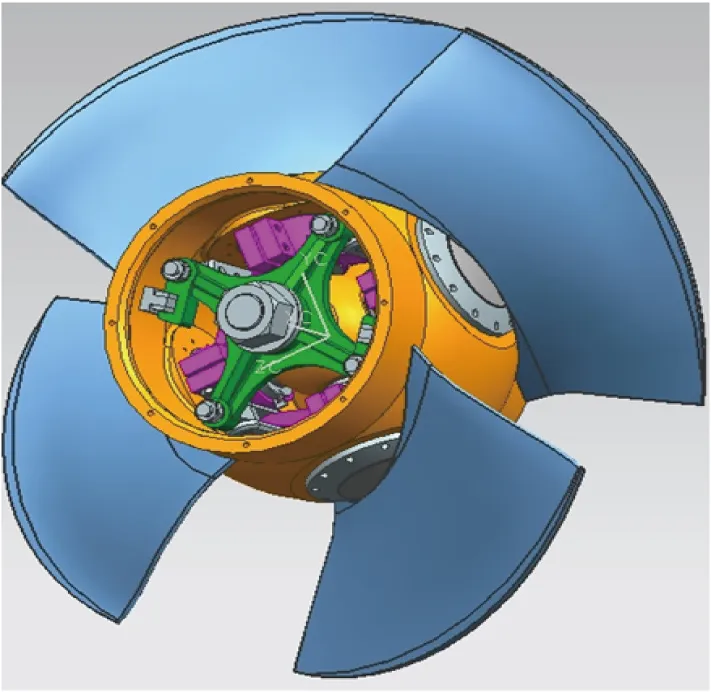
2-ը. Միջին մասում բացված են պղնձի կամամերի բաղադրիչները, որոնք խստացված են պտուտակների հետ եւ տեղադրված են կոնաձեւ կապում: Նյութը գերադասելի է ինտեգրալ ZG, իսկ որոշ մասեր պատրաստված են ZG + կնճռոտ չժանգոտվող պողպատից (այս լուծումը համալիր է եռակցման թերությունների արտադրության եւ հակված):

3. Ուղղորդեք վան մարմինը: Քանի որ լիովին կարգավորելի պոմպը հիմնականում միջին է մեծ տրամաչափի պոմպի, հաշվի է առնվում ձուլման, ծախսերի եւ այլ ասպեկտների դժվարությունը: Ընդհանրապես, նախընտրելի նյութը ZG + Q235B է: Ուղեցույցի վանը նետվում է մեկ կտորով, իսկ կեղեւի եզրը Q235B պողպատե ափսե է: Երկուսն էլ զոդում են, հետո մշակվում:

4. Պոմպի լիսեռ. Լիովին կարգավորելի պոմպը, ընդհանուր առմամբ, խոռոչ լիսեռ է, երկու ծայրերում: Նյութը գերադասելի է 45 + ծածկույթով 30CR13: The րի ուղեցույցի կրումն ու լցոնումը հիմնականում բարձրացնում է դրա կարծրությունը եւ բարելավում է մաշված դիմադրությունը:

二Կարգավորողի հիմնական բաղադրիչներին ներածություն
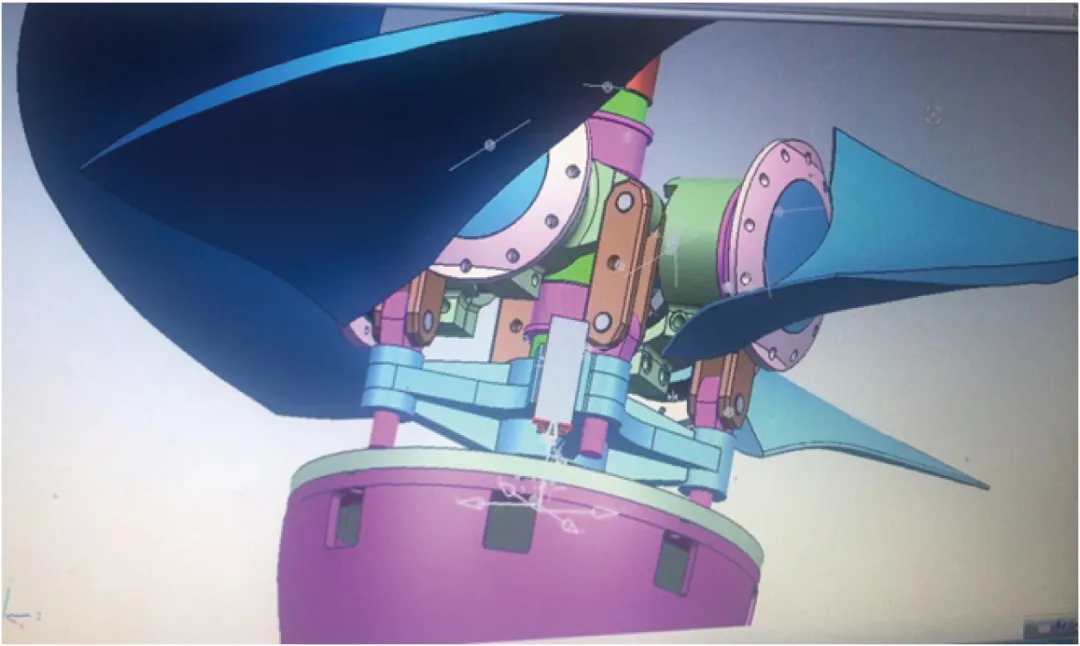
Ներկառուցված Blade անկյան հիդրավլիկ կարգավորիչը հիմնականում օգտագործվում է շուկայում այսօր: Այն հիմնականում բաղկացած է երեք մասից, պտտվող մարմին, ծածկոց եւ հսկման ցուցադրման համակարգի տուփ:

1: Պտտվող մարմին. Պտտվող մարմինը բաղկացած է աջակցության տեղից, մխոցից, վառելիքի բաքից, հիդրավլիկ էներգիայի միավորից, անկյունային սենսորային օղակ եւ այլն:
Ամբողջ պտտվող մարմինը տեղադրված է հիմնական շարժիչի լիսեռի վրա եւ պտտվում է սինխրոն լիսեռի հետ: Այն պտտվում է հիմնական շարժիչի լիսեռի վերեւում `մոնտաժային եզրերի միջով:
Մոնտաժային եզրը կապված է օժանդակ նստատեղին:
Անկյունի սենսորի չափիչ կետը տեղադրված է մխոցային գավազանով եւ փողկապի գավազանով, իսկ անկյունային սենսորը տեղադրվում է նավթի մխոցից դուրս:
Էլեկտրամատակարարման սայթաքման օղակը տեղադրվում եւ ամրագրված է նավթի բաքի ծածկույթի վրա, եւ դրա պտտվող մասը (ռոտոր) պտտվում է պտտվող մարմնի հետ համաժամանակյա: Ռոտորի վրա ելքային ավարտը միացված է հիդրավլիկ էներգաբլոկի, ճնշման ցուցիչի, ջերմաստիճանի ցուցիչի, անկյան սենսորի եւ սահմանաչափի անջատիչի հետ. Էլեկտրամատակարարման սայթաքման օղակի ստատորը միացված է շապիկի վրա կանգառի պտուտակին, եւ Ստատիկ ելքը կապված է կարգավորիչի ծածկույթի տերմինալին.
Մխոց ձողը պտուտակված է դեպիPump րի պոմպԿապի գավազան:
Հիդրավլիկ էներգաբլոկը նավթի բաքի ներսում է, որն ապահովում է նավթի մխոցի գործողությունների ուժ:
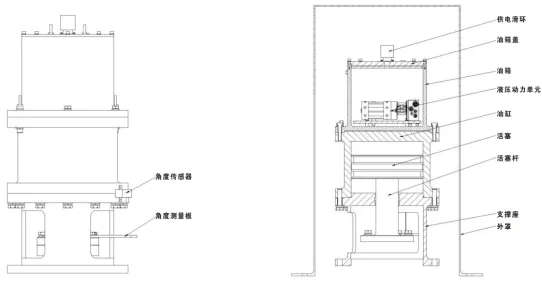
Կարգավորումը բարձրացնելիս նավթի բաքում տեղադրված են երկու բարձրացնող օղակ:
2. Ծածկեք (կոչվում է նաեւ ֆիքսված մարմին). Այն բաղկացած է երեք մասից: Մի մասը արտաքին ծածկը է. Երկրորդ մասը ծածկույթի ծածկն է. Երրորդ մասը դիտորդական պատուհանն է: Արտաքին ծածկը տեղադրվում եւ ամրացվում է հիմնական շարժիչի արտաքին ծածկույթի վերեւում `պտտվող մարմինը ծածկելու համար:
3. Կառավարման ցուցադրման համակարգի տուփ (ինչպես ցույց է տրված Նկար 3-ում). Այն բաղկացած է PLC, սենսորային էկրանից, ռելուցի, կոնտակտային, DC էլեկտրամատակարարումից եւ այլ պարամետրերով: Վերահսկիչ համակարգը ունի երկու գործառույթ, տեղական հսկողություն եւ հեռակառավարիչ: Վերահսկիչ երկու ռեժիմներն անցնում են երկկողմանի գլխիկի միջոցով կառավարման ցուցադրման համակարգի տուփի վրա (նշված է «Կառավարման ցուցադրման տուփ», նույնը, ներքեւում:
三Համեմատ եւ ասինխրոն շարժիչների համեմատություն եւ ընտրություն
A. Համաժամանակյա շարժիչների առավելություններն ու թերությունները
Առավելություններ.
1. Ռոտորի եւ Ստատորի միջեւ օդի բացը մեծ է, եւ տեղադրումը եւ ճշգրտումը հարմար են:
2-ը. Հարթ գործողություն եւ ծանր ծանրաբեռնվածության հզորություն:
3. Արագությունը բեռով չի փոխվում:
4. Բարձր արդյունավետություն:
5. Իշխանական գործոնը կարող է առաջադեմ լինել: Ռեակտիվ էներգիան կարող է տրամադրվել էլեկտրաէներգիայի ցանցին, դրանով իսկ բարելավելով էլեկտրաէներգիայի ցանցի որակը: Բացի այդ, երբ ուժային գործոնը ճշգրտվում է 1-ի կամ դրա կողքին, Ammeter- ի ընթերցումը կնվազի ներկայումս ռեակտիվ բաղադրիչի կրճատման պատճառով, ինչը ասինխրոն շարժիչների համար անհնար է:
Թերությունները.
1. Ռոտորը պետք է ապահովվի նվիրված հուզիչ սարքով:
2-ը: Արժեքը բարձր է:
3. Պահպանումն ավելի բարդ է:
Բ. Ասանկրոնային շարժիչների առավելություններն ու թերությունները
Առավելություններ.
1. Ռոտորը պետք չէ միանալ այլ էներգիայի աղբյուրների հետ:
2. Պարզ կառուցվածքը, թեթեւ քաշը եւ ցածր արժեքը:
3. Հեշտ սպասարկում:
Թերությունները.
1. Ռեակտիվ ուժը պետք է կազմվի էլեկտրական ցանցից, ինչը վատթարանում է էլեկտրական ցանցի որակը:
2. Ռոտորի եւ Ստատորի միջեւ օդի բացը փոքր է, իսկ տեղադրումը եւ ճշգրտումը անհարմար են:
Գ. ՄՈՏՈՐՍԻ ԸՆՏՐՈՒԹՅՈՒՆ
1000 կՎտ-ի գնահատված ուժ ունեցող շարժիչների ընտրությունը եւ 300R / րոպե արագությունը պետք է որոշվի `հիմնվելով տեխնիկական եւ տնտեսական համեմատությունների հիման վրա` ըստ հատուկ պայմանների:
1. Water րային պահպանողական արդյունաբերության մեջ, երբ տեղադրված հզորությունը, ընդհանուր առմամբ, 800 կՎտ-ից ցածր է, քանի որ նախընտրելի են ասինխրոն շարժիչները, եւ երբ տեղադրված հզորությունը ավելի մեծ է, քան 800 կՎտ, համաժամանակյա շարժիչները հակված են ընտրվելու:
2. Համաժամանակյա շարժիչների եւ ասինխրոն շարժիչների միջեւ հիմնական տարբերությունն այն է, որ ռոտորի վրա հուզող ոլորուն է, եւ տհաճի հուզիչ էկրանը պետք է կազմաձեւվի:
3. Իմ երկրի էլեկտրամատակարարման բաժինը նախատեսում է, որ օգտագործողի էլեկտրամատակարարման ուժի գործոնը պետք է հասնի 0.90-ի կամ վերեւում: Սինխրոն շարժիչներն ունեն բարձր էներգիայի գործոն եւ կարող են բավարարել էլեկտրամատակարարման պահանջները. Մինչ ասինխրոն շարժիչներն ունեն ցածր էներգիայի գործոն եւ չեն կարող բավարարել էլեկտրամատակարարման պահանջները, եւ անհրաժեշտ է ռեակտիվ փոխհատուցում: Հետեւաբար, ասինխրոն շարժիչներով հագեցած պոմպակայանները, ընդհանուր առմամբ, պետք է հագեցած լինեն ռեակտիվ փոխհատուցման էկրաններով:
4. Սինխրոն շարժիչների կառուցվածքը ավելի բարդ է, քան ասինխրոն շարժիչները: Երբ պոմպակայանի նախագիծը պետք է հաշվի առնի ինչպես էլեկտրաէներգիայի արտադրությունը, այնպես էլ փուլի մոդուլացումը, պետք է ընտրվի համաժամանակյա շարժիչ:
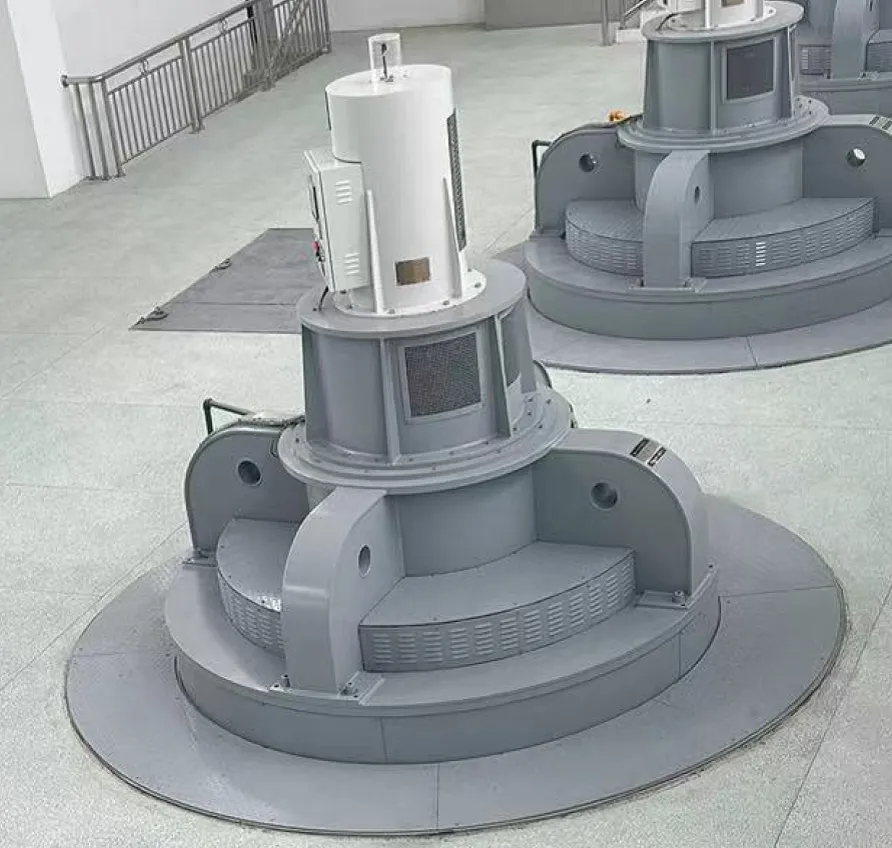
Լիովին կարգավորելի առանցքային խառը հոսքի պոմպերը լայնորեն օգտագործվում ենՈւղղահայաց միավորներ(Zlq, hlq, zlqk),Հորիզոնական (հակված) միավորներ(ZWQ, ZXQ, ZGQ) եւ կարող է օգտագործվել նաեւ ցածր վերելակի եւ խոշոր տրամագծով LP միավորներում:
Փոստի ժամանակ: Օգոստոս-30-2024