
पूरी तरह से समायोज्य शाफ्ट मिश्रित प्रवाह पंप एक मध्यम और बड़े व्यास पंप प्रकार है जो पंप ब्लेड को घुमाने के लिए एक ब्लेड कोण समायोजक का उपयोग करता है, जिससे प्रवाह और सिर में परिवर्तन प्राप्त करने के लिए ब्लेड प्लेसमेंट कोण को बदलना पड़ता है। मुख्य संदेश का माध्यम 0 ~ 50 ℃ पर साफ पानी या हल्के सीवेज है (विशेष मीडिया में समुद्री जल और पीले नदी का पानी शामिल है)। इसका उपयोग मुख्य रूप से जल कंजरवेंसी परियोजनाओं, सिंचाई, जल निकासी और पानी के मोड़ परियोजनाओं के क्षेत्रों में किया जाता है, और इसका उपयोग कई राष्ट्रीय परियोजनाओं जैसे कि दक्षिण-से-उत्तर जल मोड़ परियोजना और यांग्त्ज़ी नदी से हुइहे नदी के मोड़ परियोजना में किया जाता है।
शाफ्ट और मिश्रित प्रवाह पंप के ब्लेड स्थानिक रूप से विकृत हैं। जब पंप की ऑपरेटिंग स्थिति डिजाइन बिंदु से विचलित हो जाती है, तो ब्लेड के आंतरिक और बाहरी किनारों की परिधि गति के बीच का अनुपात नष्ट हो जाता है, जिसके परिणामस्वरूप अलग -अलग रेडी पर ब्लेड (एयरफिल्स) द्वारा उत्पन्न लिफ्ट अब बराबर नहीं होती है, जिससे पंप में पानी का प्रवाह अशांत हो जाता है और पानी की हानि बढ़ जाती है; डिजाइन बिंदु से दूर, पानी के प्रवाह की अशांति और पानी की हानि जितनी अधिक होती है, उतनी ही अधिक होती है। अक्षीय और मिश्रित प्रवाह पंपों में कम सिर और अपेक्षाकृत संकीर्ण उच्च दक्षता वाले क्षेत्र होते हैं। उनके काम करने वाले सिर के परिवर्तन से पंप की दक्षता में उल्लेखनीय कमी आएगी। इसलिए, अक्षीय और मिश्रित प्रवाह पंप आमतौर पर ऑपरेटिंग परिस्थितियों के काम के प्रदर्शन को बदलने के लिए थ्रॉटलिंग, टर्निंग और अन्य समायोजन विधियों का उपयोग नहीं कर सकते हैं; एक ही समय में, क्योंकि गति विनियमन की लागत बहुत अधिक है, वास्तविक संचालन में चर गति विनियमन का उपयोग शायद ही कभी किया जाता है। चूंकि अक्षीय और मिश्रित प्रवाह पंपों में एक बड़ा हब शरीर होता है, इसलिए यह समायोज्य कोणों के साथ रॉड तंत्र को जोड़ने वाले ब्लेड और ब्लेड को स्थापित करने के लिए सुविधाजनक है। इसलिए, अक्षीय और मिश्रित प्रवाह पंपों की कार्य स्थिति समायोजन आमतौर पर चर कोण समायोजन को अपनाता है, जो अक्षीय और मिश्रित प्रवाह पंपों को सबसे अनुकूल कार्य परिस्थितियों में संचालित कर सकता है।
जब अपस्ट्रीम और डाउनस्ट्रीम जल स्तर का अंतर बढ़ता है (यानी, शुद्ध सिर बढ़ता है), ब्लेड प्लेसमेंट कोण को एक छोटे मूल्य में समायोजित किया जाता है। अपेक्षाकृत उच्च दक्षता बनाए रखते हुए, मोटर को ओवरलोडिंग से रोकने के लिए पानी का प्रवाह दर उचित रूप से कम हो जाती है; जब अपस्ट्रीम और डाउनस्ट्रीम जल स्तर का अंतर कम हो जाता है (यानी, शुद्ध सिर कम हो जाता है), ब्लेड प्लेसमेंट कोण को मोटर को पूरी तरह से लोड करने के लिए एक बड़े मूल्य पर समायोजित किया जाता है और पानी पंप को अधिक पानी पंप करने की अनुमति देता है। संक्षेप में, शाफ्ट और मिश्रित प्रवाह पंपों का उपयोग जो ब्लेड कोण को बदल सकते हैं, इसे सबसे अनुकूल कार्य अवस्था में संचालित कर सकते हैं, जबरन शटडाउन से बच सकते हैं और उच्च दक्षता और उच्च पानी पंपिंग प्राप्त कर सकते हैं।
इसके अलावा, जब यूनिट शुरू की जाती है, तो ब्लेड प्लेसमेंट कोण को न्यूनतम में समायोजित किया जा सकता है, जो मोटर के शुरुआती लोड (रेटेड पावर के लगभग 1/3 ~ 2/3) को कम कर सकता है; बंद करने से पहले, ब्लेड कोण को एक छोटे मूल्य में समायोजित किया जा सकता है, जो शटडाउन के दौरान पंप में पानी के प्रवाह की बैकफ्लो गति और पानी की मात्रा को कम कर सकता है, और उपकरणों पर पानी के प्रवाह के प्रभाव क्षति को कम कर सकता है।
संक्षेप में, ब्लेड कोण समायोजन का प्रभाव महत्वपूर्ण है: of कोण को एक छोटे मूल्य में समायोजित करना शुरू करना और बंद करना आसान बनाता है; ② कोण को एक बड़े मूल्य में समायोजित करने से प्रवाह दर बढ़ जाती है; ③ कोण को समायोजित करने से पंप यूनिट को आर्थिक रूप से चलाया जा सकता है। यह देखा जा सकता है कि ब्लेड कोण समायोजक मध्यम और बड़े पंपिंग स्टेशनों के संचालन और प्रबंधन में अपेक्षाकृत महत्वपूर्ण स्थिति रखता है।
पूरी तरह से समायोज्य शाफ्ट मिश्रित प्रवाह पंप के मुख्य शरीर में तीन भाग होते हैं: पंप हेड, नियामक और मोटर।
1। पंप हेड
पूरी तरह से समायोज्य अक्षीय मिश्रित प्रवाह पंप की विशिष्ट गति 400 ~ 1600 है (अक्षीय प्रवाह पंप की पारंपरिक विशिष्ट गति 700 ~ 1600 है), (मिश्रित प्रवाह पंप की पारंपरिक विशिष्ट गति 400 ~ 800 है), और सामान्य सिर 0 ~ 30.6m है। पंप हेड मुख्य रूप से वाटर इनलेट हॉर्न (वाटर इनलेट विस्तार संयुक्त), रोटर पार्ट्स, इम्पेलर चैम्बर पार्ट्स, गाइड वेन बॉडी, पंप सीट, कोहनी, पंप शाफ्ट पार्ट्स, पैकिंग पार्ट्स, आदि से बना है। प्रमुख घटकों का परिचय।
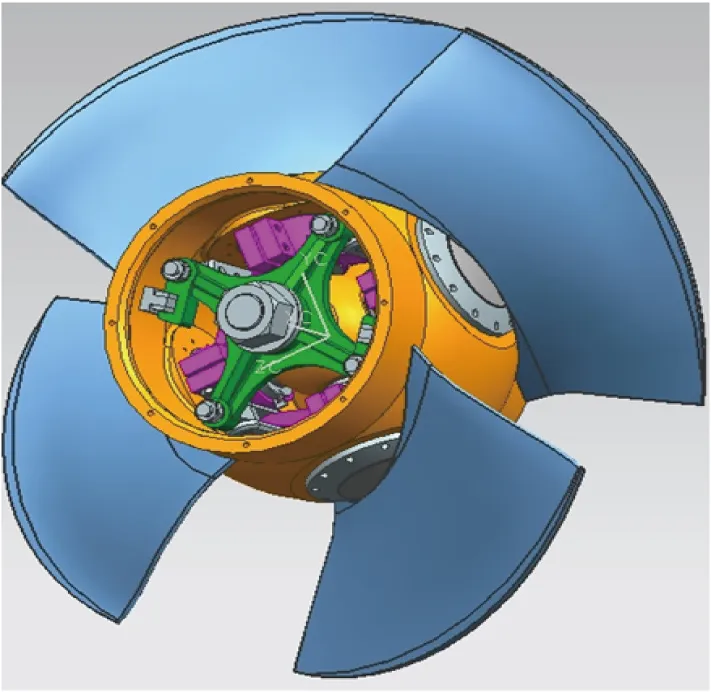
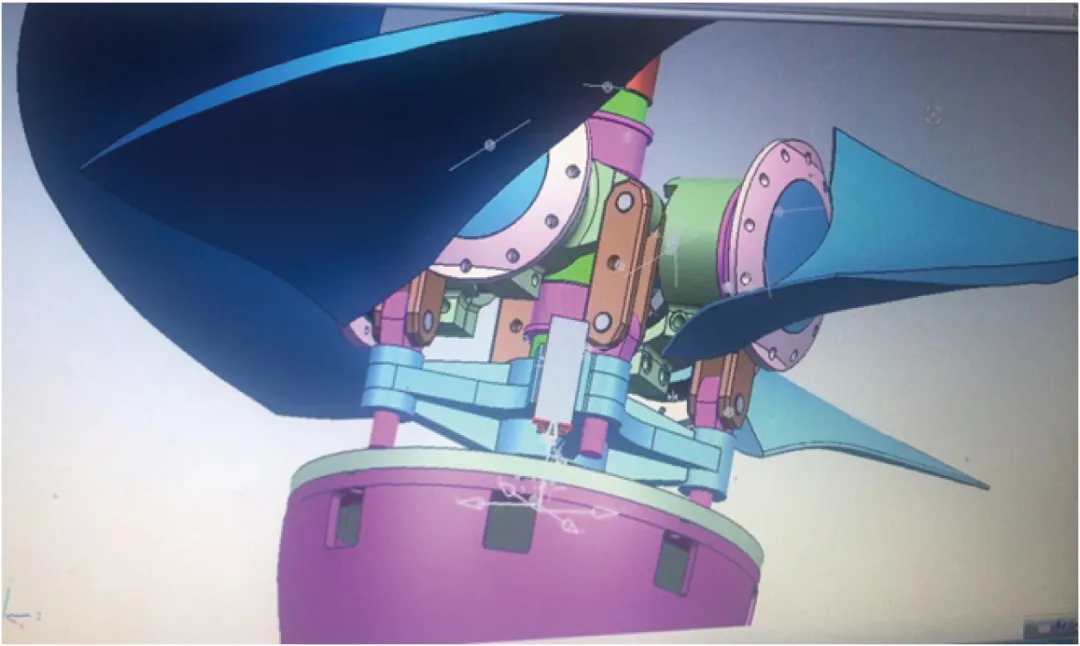
1। रोटर घटक पंप हेड में मुख्य घटक है, जो ब्लेड, रोटर बॉडी, लोअर पुल रॉड, बेयरिंग, क्रैंक आर्म, ऑपरेटिंग फ्रेम, कनेक्टिंग रॉड और अन्य भागों से बना है। समग्र विधानसभा के बाद, एक स्थिर संतुलन परीक्षण किया जाता है। उनमें से, ब्लेड सामग्री अधिमानतः ZG0CR13NI4MO (उच्च कठोरता और अच्छी पहनने के प्रतिरोध) है, और CNC मशीनिंग को अपनाया जाता है। शेष भागों की सामग्री आम तौर पर मुख्य रूप से ZG है।
2। प्ररितकर्ता कक्ष घटकों को एकीकृत रूप से बीच में खोला जाता है, जो बोल्ट के साथ कड़ा होते हैं और शंक्वाकार पिन के साथ तैनात होते हैं। सामग्री अधिमानतः अभिन्न ZG है, और कुछ हिस्से ZG + लाइन वाले स्टेनलेस स्टील से बने होते हैं (यह समाधान वेल्डिंग दोषों के निर्माण और प्रवण के लिए जटिल है, इसलिए इसे जितना संभव हो उतना बचा जाना चाहिए)।

3। गाइड वेन बॉडी। चूंकि पूरी तरह से समायोज्य पंप मूल रूप से बड़े-कैलिबर पंप के लिए एक माध्यम है, इसलिए कास्टिंग, विनिर्माण लागत और अन्य पहलुओं की कठिनाई को ध्यान में रखा जाता है। आम तौर पर, पसंदीदा सामग्री ZG+Q235B है। गाइड वेन को एक ही टुकड़े में डाला जाता है, और शेल निकला हुआ किनारा Q235B स्टील प्लेट है। दोनों को वेल्डेड किया जाता है और फिर संसाधित किया जाता है।

4। पंप शाफ्ट: पूरी तरह से समायोज्य पंप आम तौर पर दोनों छोरों पर निकला हुआ किनारा संरचनाओं के साथ एक खोखले शाफ्ट है। सामग्री अधिमानतः 45 + क्लैडिंग 30CR13 है। वाटर गाइड असर और भराव में क्लैडिंग मुख्य रूप से अपनी कठोरता को बढ़ाने और पहनने के प्रतिरोध में सुधार करने के लिए है।

二। नियामक के मुख्य घटकों का परिचय
अंतर्निहित ब्लेड कोण हाइड्रोलिक नियामक का उपयोग मुख्य रूप से आज बाजार में किया जाता है। इसमें मुख्य रूप से तीन भाग होते हैं: घूर्णन शरीर, कवर और नियंत्रण प्रदर्शन प्रणाली बॉक्स।

1। घूर्णन शरीर: घूर्णन शरीर में एक समर्थन सीट, एक सिलेंडर, एक ईंधन टैंक, एक हाइड्रोलिक पावर यूनिट, एक कोण सेंसर, एक बिजली आपूर्ति पर्ची रिंग, आदि शामिल हैं।
पूरे घूर्णन शरीर को मुख्य मोटर शाफ्ट पर रखा जाता है और शाफ्ट के साथ सिंक्रोनस रूप से घूमता है। यह बढ़ते निकला हुआ किनारा के माध्यम से मुख्य मोटर शाफ्ट के शीर्ष पर स्थित है।
बढ़ते निकला हुआ किनारा सहायक सीट से जुड़ा हुआ है।
कोण सेंसर का मापने बिंदु पिस्टन रॉड और टाई रॉड आस्तीन के बीच स्थापित किया गया है, और कोण सेंसर तेल सिलेंडर के बाहर स्थापित किया गया है।
पावर सप्लाई स्लिप रिंग स्थापित है और तेल टैंक कवर पर तय की जाती है, और इसका घूर्णन भाग (रोटर) घूर्णन शरीर के साथ सिंक्रोनस रूप से घूमता है। रोटर पर आउटपुट अंत हाइड्रोलिक पावर यूनिट, प्रेशर सेंसर, तापमान सेंसर, एंगल सेंसर और लिमिट स्विच से जुड़ा होता है; पावर सप्लाई स्लिप रिंग का स्टेटर हिस्सा कवर पर स्टॉप स्क्रू से जुड़ा हुआ है, और स्टेटर आउटलेट नियामक कवर में टर्मिनल से जुड़ा हुआ है;
पिस्टन रॉड को बोल्ट किया गया हैपानी का पम्पटाई रॉड।
हाइड्रोलिक पावर यूनिट तेल टैंक के अंदर है, जो तेल सिलेंडर की कार्रवाई के लिए बिजली प्रदान करता है।
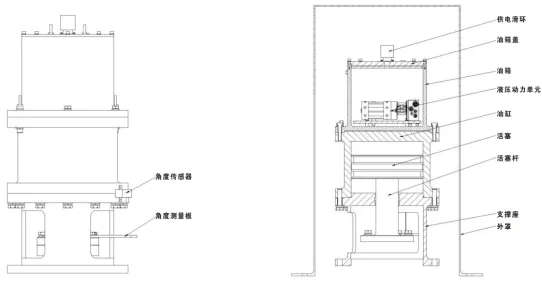
नियामक को उठाते समय उपयोग के लिए तेल टैंक पर दो उठाने वाले छल्ले लगाए जाते हैं।
2। कवर (जिसे फिक्स्ड बॉडी भी कहा जाता है): इसमें तीन भाग होते हैं। एक हिस्सा बाहरी कवर है; दूसरा भाग कवर कवर है; तीसरा भाग अवलोकन खिड़की है। बाहरी कवर स्थापित किया गया है और घूर्णन शरीर को कवर करने के लिए मुख्य मोटर के बाहरी कवर के शीर्ष पर तय किया गया है।
3। नियंत्रण डिस्प्ले सिस्टम बॉक्स (जैसा कि चित्र 3 में दिखाया गया है): इसमें पीएलसी, टच स्क्रीन, रिले, संपर्ककर्ता, डीसी पावर सप्लाई, नॉब, इंडिकेटर लाइट आदि शामिल हैं। टच स्क्रीन वर्तमान ब्लेड कोण, समय, तेल दबाव और अन्य मापदंडों को प्रदर्शित कर सकती है। नियंत्रण प्रणाली के दो कार्य हैं: स्थानीय नियंत्रण और रिमोट कंट्रोल। दो नियंत्रण मोड नियंत्रण डिस्प्ले सिस्टम बॉक्स पर दो-स्थिति घुंडी के माध्यम से स्विच किए जाते हैं ("नियंत्रण डिस्प्ले बॉक्स" के रूप में संदर्भित, नीचे समान)।
三। तुल्यकालिक और अतुल्यकालिक मोटर्स की तुलना और चयन
A. सिंक्रोनस मोटर्स के लाभ और नुकसान
लाभ:
1। रोटर और स्टेटर के बीच हवा का अंतर बड़ा है, और स्थापना और समायोजन सुविधाजनक हैं।
2। चिकनी संचालन और मजबूत अधिभार क्षमता।
3। लोड के साथ गति नहीं बदलती है।
4। उच्च दक्षता।
5। पावर फैक्टर को उन्नत किया जा सकता है। पावर ग्रिड को प्रतिक्रियाशील शक्ति प्रदान की जा सकती है, जिससे पावर ग्रिड की गुणवत्ता में सुधार होता है। इसके अलावा, जब पावर फैक्टर को 1 या उसके करीब समायोजित किया जाता है, तो वर्तमान में प्रतिक्रियाशील घटक की कमी के कारण एमीटर पर पढ़ना कम हो जाएगा, जो एसिंक्रोनस मोटर्स के लिए असंभव है।
नुकसान:
1। रोटर को एक समर्पित उत्तेजना उपकरण द्वारा संचालित करने की आवश्यकता है।
2। लागत अधिक है।
3। रखरखाव अधिक जटिल है।
B. एसिंक्रोनस मोटर्स के लाभ और नुकसान
लाभ:
1। रोटर को अन्य बिजली स्रोतों से जुड़े होने की आवश्यकता नहीं है।
2। सरल संरचना, हल्के वजन और कम लागत।
3। आसान रखरखाव।
नुकसान:
1। प्रतिक्रियाशील शक्ति को पावर ग्रिड से खींचा जाना चाहिए, जो पावर ग्रिड की गुणवत्ता को बिगड़ता है।
2। रोटर और स्टेटर के बीच हवा का अंतर छोटा है, और स्थापना और समायोजन असुविधाजनक हैं।
C. मोटर्स का चयन
1000kW की रेटेड पावर और 300R/मिनट की रेटेड गति के साथ मोटर्स का चयन विशिष्ट परिस्थितियों के अनुसार तकनीकी और आर्थिक तुलनाओं के आधार पर निर्धारित किया जाना चाहिए।
1। जल कंजर्वेंसी उद्योग में, जब स्थापित क्षमता आम तौर पर 800kW से नीचे होती है, तो अतुल्यकालिक मोटर्स को पसंद किया जाता है, और जब स्थापित क्षमता 800kW से अधिक होती है, तो सिंक्रोनस मोटर्स का चयन किया जाता है।
2। सिंक्रोनस मोटर्स और एसिंक्रोनस मोटर्स के बीच मुख्य अंतर यह है कि रोटर पर एक उत्तेजना घुमावदार है, और एक थायरिस्टर उत्तेजना स्क्रीन को कॉन्फ़िगर करने की आवश्यकता है।
3। मेरे देश का बिजली आपूर्ति विभाग यह निर्धारित करता है कि उपयोगकर्ता की बिजली की आपूर्ति में बिजली कारक 0.90 या उससे अधिक तक पहुंचना होगा। सिंक्रोनस मोटर्स में एक उच्च शक्ति कारक है और बिजली की आपूर्ति आवश्यकताओं को पूरा कर सकता है; जबकि अतुल्यकालिक मोटर्स में एक कम बिजली कारक है और बिजली की आपूर्ति आवश्यकताओं को पूरा नहीं कर सकता है, और प्रतिक्रियाशील मुआवजे की आवश्यकता है। इसलिए, एसिंक्रोनस मोटर्स से लैस पंप स्टेशन आमतौर पर प्रतिक्रियाशील मुआवजा स्क्रीन से लैस होने की आवश्यकता होती है।
4। सिंक्रोनस मोटर्स की संरचना एसिंक्रोनस मोटर्स की तुलना में अधिक जटिल है। जब एक पंप स्टेशन परियोजना को बिजली उत्पादन और चरण मॉड्यूलेशन दोनों को ध्यान में रखने की आवश्यकता होती है, तो एक तुल्यकालिक मोटर का चयन किया जाना चाहिए।
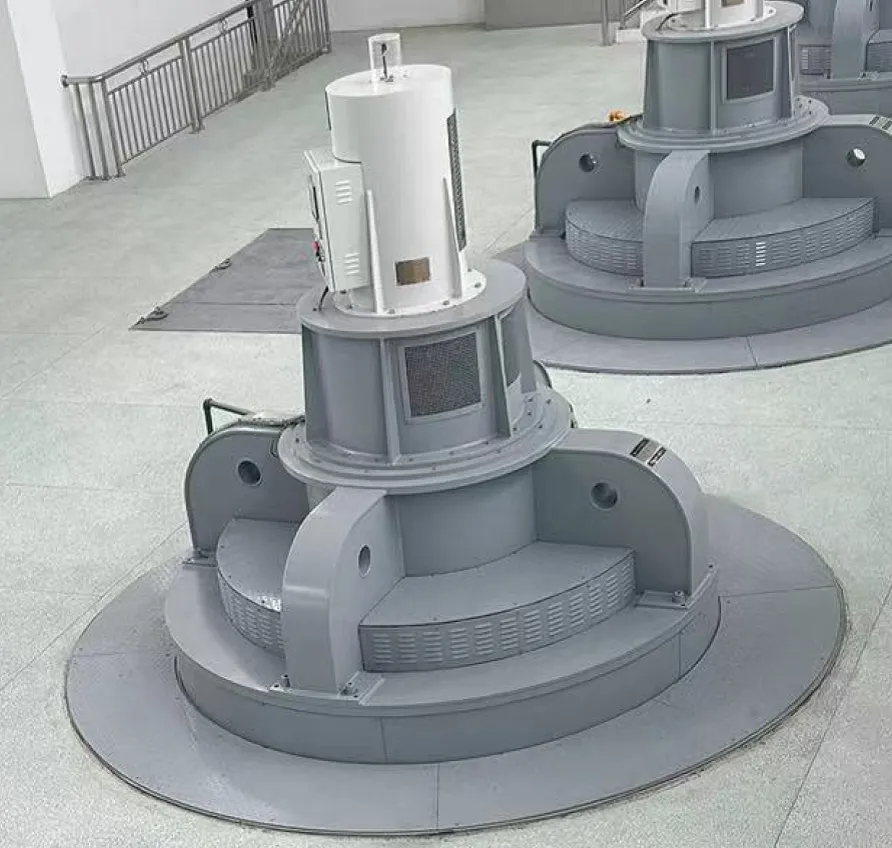
पूरी तरह से समायोज्य अक्षीय मिश्रित प्रवाह पंप व्यापक रूप से उपयोग किए जाते हैंऊर्ध्वाधर इकाइयाँ(ZLQ, HLQ, ZLQK),क्षैतिज (इच्छुक) इकाइयाँ(ZWQ, ZXQ, ZGQ), और इसका उपयोग कम-लिफ्ट और बड़े-व्यास एलपी इकाइयों में भी किया जा सकता है।
पोस्ट टाइम: अगस्त -30-2024