
Täielikult reguleeritav võlli segatud voolupump on keskmise ja suure läbimõõduga pumba tüüp, mis kasutab pumba labade pööramiseks tera nurga regulaatori pöörlemiseks, muutes seeläbi tera paigutusnurka voolu ja pea muutuste saavutamiseks. Peamine edastatava keskkonna on puhas vesi või kerge kanalisatsioon kiirusel 0 ~ 50 ℃ (spetsiaalsed söötmed hõlmavad merevesi ja kollast jõevett). Seda kasutatakse peamiselt veekaitseprojektide, niisutamise, drenaaži- ja vee ümbersuunamisprojektide valdkonnas ning seda kasutatakse paljudes riiklikes projektides, näiteks North-Northi veesuunamise projekt ja Yangtse jõe Huaihe jõe ümbersuunamisprojekti.
Võlli ja segavoolupumba terad on ruumiliselt moonutatud. Kui pumba töötingimused kalduvad projekteerimispunktist kõrvale, hävitatakse labade sisemise ja välimise serva ümbermõõtmiskiiruse suhe, mille tulemuseks on labade (aerodünaamika) tekitatud tõste erineva raadiusega, mis ei ole enam võrdsed, põhjustades seega pumba veevoolu turgude ja veekaotuse suurenemiseks; Mida kaugemale kujunduspunktist eemal, seda suurem on veevoolu turbulents ja seda suurem on veekaotus. Aksiaalsetel ja segatud voolupumpadel on madal pea ja suhteliselt kitsas suure tõhususega tsoon. Nende tööpea muutus põhjustab pumba efektiivsuse olulist vähenemist. Seetõttu ei saa aksiaalsed ja segavoolupumbad tavaliselt kasutada töötingimuste töötulemuste muutmiseks drosselingut, pööramist ja muid reguleerimismeetodeid; Samal ajal, kuna kiiruse reguleerimise maksumus on liiga suur, kasutatakse tegeliku töö korral muutuva kiiruse reguleerimist harva. Kuna telg- ja segavoolupumpadel on suurem jaoturi korpus, on mugav paigaldada labad ja labade ühendusvarda mehhanismid reguleeritavate nurkadega. Seetõttu kasutab aksiaalsete ja segavoolupumpade töötingimuste reguleerimine tavaliselt muutuva nurga reguleerimise, mis võib muuta telg- ja segavoolupumbad kõige soodsamates töötingimustes.
Kui ülesvoolu ja allavoolu veetaseme erinevus suureneb (st netopea suureneb), reguleeritakse tera paigutusnurk väiksema väärtuseni. Hoides suhteliselt kõrge efektiivsuse, vähendatakse veevoolukiirust sobivalt, et vältida mootori ülekoormamist; Kui ülesvoolu ja allavoolu veetaseme erinevus väheneb (see tähendab, et netopea väheneb), reguleeritakse tera paigutusnurk suurema väärtuseni, et mootorit täielikult laadida ja võimaldada veepumbal rohkem vett pumbata. Lühidalt, võlli ja segavoolupumpade kasutamine, mis võivad muuta tera nurka, võib muuta selle kõige soodsamas tööseisundis, vältides sunniviisilist väljalülitamist ja saavutades kõrge efektiivsuse ja kõrge veepumpamise.
Lisaks, kui seadet käivitatakse, saab tera paigutusnurga kohandada minimaalseks, mis võib vähendada mootori lähtekoormust (umbes 1/3 ~ 2/3 nimivõimsusest); Enne väljalülitamist saab tera nurga reguleerida väiksema väärtuseni, mis võib vähendada pumba veevoolu tagasilöögikiirust ja vee vooluhulka sulgemise ajal ning vähendada seadme veevoolu mõjukahjustusi.
Lühidalt öeldes on tera nurga reguleerimise mõju oluline: ① Nurga kohandamine väiksema väärtusega muudab käivitamise ja sulgemise lihtsamaks; ② Nurga reguleerimine suurema väärtuseni suurendab voolukiirust; ③ Nurga reguleerimine võib pumba seadme majanduslikult käivitada. On näha, et tera nurga regulaator on keskmise ja suurte pumpamisjaamade töös ja haldamisel suhteliselt oluline positsioon.
Täielikult reguleeritava võlli segavoolupumba põhikorpus koosneb kolmest osast: pumba pea, regulaatori ja mootoriga.
1. pumba pea
Täielikult reguleeritava aksiaalse segavoolupumba spetsiifiline kiirus on 400 ~ 1600 (aksiaalse voolupumba tavapärane spetsiifiline kiirus on 700 ~ 1600), (segatud voolupumba tavapärane spetsiifiline kiirus on 400 ~ 800) ja üldpea on 0 ~ 30,6m. Pumbapea koosneb peamiselt vee sisselaskeavast (vee sisselaske vuugiliigendist), rootori osadest, tiiviku kambri osadest, juhtiv keha, pumba ist, küünarnukk, pumba võlli osad, pakkimisosad jne. Sissejuhatus võtmekomponentidesse:
1. Rootori komponent on pumbapea südamikomponent, mis koosneb labadest, rootori kerest, alumisest tõmbevardast, laagrist, vändaharust, tööraamist, ühendusvardast ja muudest osadest. Pärast üldist montaaži tehakse staatiline tasakaalu test. Nende hulgas on tera materjal eelistatavalt ZG0CR13NI4MO (kõrge kõvadus ja hea kulumiskindlus) ning võetakse kasutusele CNC töötlemine. Ülejäänud osade materjal on tavaliselt peamiselt ZG.
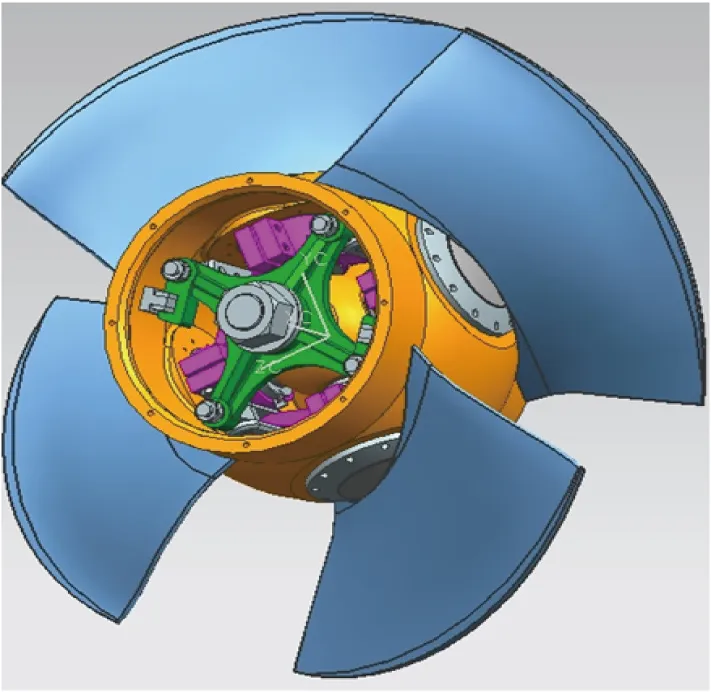
2. tiivikukambri komponendid avatakse täielikult keskel, mis pingutatakse poltidega ja paigutatakse kooniliste tihvtidega. Materjal on eelistatavalt integreeritud ZG ja mõned osad on valmistatud ZG + vooderdatud roostevabast terasest (seda lahendust on keeruline valmistada ja keevitada defektidele, seega tuleks seda võimalikult palju vältida).

3. Juhtiv keha. Kuna täielikult reguleeritav pump on põhimõtteliselt keskmise ja suure kaliibriga pump, võetakse arvesse valamise, tootmiskulude ja muude aspektide raskust. Üldiselt on eelistatud materjal ZG+Q235B. Juhend laba valatakse ühes tükis ja kesta äärik on q235b terasest plaat. Need kaks on keevitatud ja seejärel töödeldud.

4. pumba võll: täielikult reguleeritav pump on üldiselt õõnes võll, mille mõlemal otsal on äärikukonstruktsioonid. Materjal on eelistatavalt sepistatud 45 + kattega 30CR13. Veejuhendi laagri ja täiteaine katted on peamiselt selle kõvaduse suurendamiseks ja kulumiskindluse parandamiseks.

二. Sissejuhatus regulaatori põhikomponentidesse
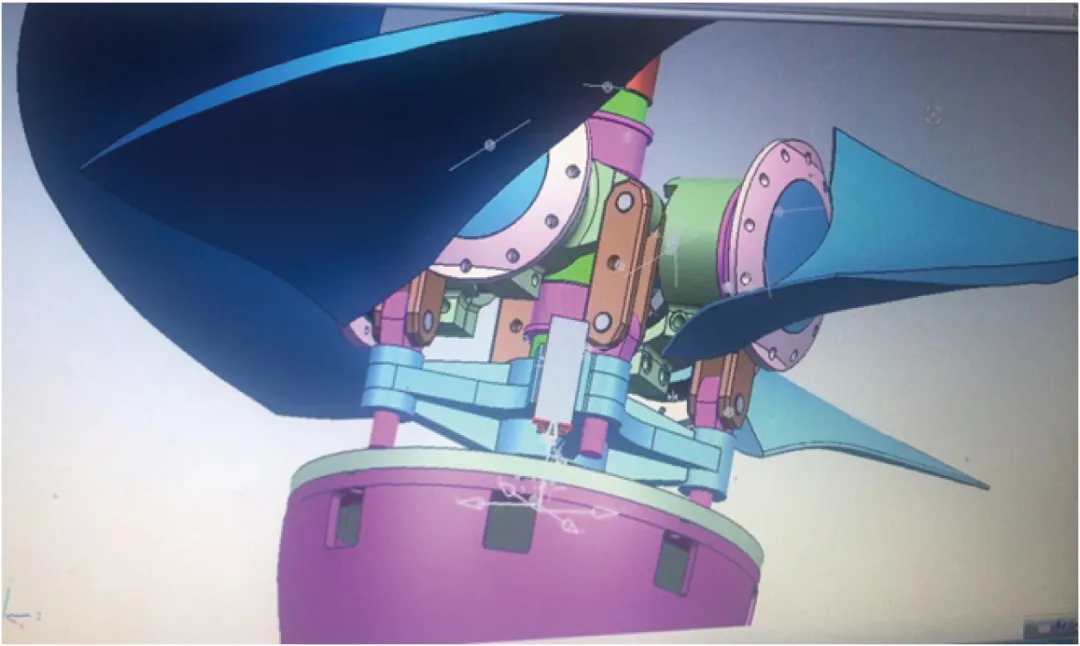
Sisseehitatud tera nurga hüdraulilist regulaatorit kasutatakse tänapäeval peamiselt turul. See koosneb peamiselt kolmest osast: pöörlev korpus, katte ja juhtseadmete juhtimine.

1. Pöörlev korpus: pöörlev korpus koosneb tugistmest, silindrist, kütusepaagist, hüdraulilisest võimsusest, nurgaandurist, toiteallika libisemisrõngast jne.
Kogu pöörlev korpus asetatakse põhimootorivõllile ja pöörleb sünkroonselt võlliga. See on kinnitatud pealiiku kaudu põhitõrje ülaosale.
Kinnitusäärik on ühendatud toetava istmega.
Nurgaanduri mõõtepunkt paigaldatakse kolvi varda ja lipsuvarda vahele ning nurgaandur paigaldatakse õlisilindri väljapoole.
Toiteallika libisemisrõngas paigaldatakse ja fikseeritakse õlimahuti kattele ning selle pöörlev osa (rootor) pöörleb sünkroonselt pöörleva korpusega. Rootori väljund ots on ühendatud hüdraulilise võimsuse seadme, rõhuanduri, temperatuurianduri, nurgaanduri ja piirlülitiga; Toiteallika libisemisrõnga staatori osa on ühendatud katte stoppkruviga ja staatori väljalaskeava on ühendatud regulaatori katte klemmiga;
Kolvi varras on poltidegaveepumplipsuvarras.
Hüdrauliline võimsusüksus asub õlimahuti sees, mis annab õlisilindri toimimiseks energiat.
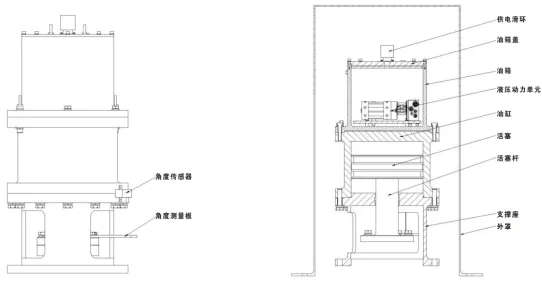
Naftapaaki paigaldatakse regulaatori tõstmiseks kaks tõsterõngast.
2. kate (nimetatakse ka fikseeritud korpuseks): see koosneb kolmest osast. Üks osa on välimine kate; Teine osa on kaanekate; Kolmas osa on vaatlusaken. Väline kate on paigaldatud ja kinnitatud põhimootori välimise kate ülaosale, et katta pöörlev korpus.
3. Juhtimispaneku süsteemikast (nagu näidatud joonisel 3): see koosneb PLC -st, puutetundlikust ekraanist, relee, kontaktorist, alalisvoolu toiteallikast, nupust, indikaatorvalgust jne. Puutetundlik ekraan võib kuvada praeguse tera nurga, aja, õlirõhu ja muude parameetrite. Juhtimissüsteemil on kaks funktsiooni: kohalik juhtimine ja kaugjuhtimispult. Kaks juhtimisrežiimi lülitatakse juhtseadmekasti juhtimis kuvade kahe positsiooniga nupu kaudu (viidatud kui "juhtseadmekast", sama allpool).
三. Sünkroonsete ja asünkroonmootorite võrdlus ja valik
A. Sünkroonmootorite eelised ja puudused
Eelised:
1. Rootori ja staatori vaheline õhuvahe on suur ning paigaldamine ja reguleerimine on mugavad.
2. sujuv töö ja tugev ülekoormusvõime.
3. Kiirus ei muutu koormusega.
4. kõrge tõhusus.
5. Võimsustegurit saab edendada. Reaktiivset võimsust saab anda elektrivõrgule, parandades seeläbi elektrivõrgu kvaliteeti. Lisaks, kui võimsustegurit kohandatakse 1 või lähedale, väheneb ampermeetri näit reaktiivse komponendi vähenemise tõttu voolu korral, mis on asünkroonsete mootorite puhul võimatu.
Puudused:
1. Rootori toiteallikaks tuleb spetsiaalne ergutusseade.
2. Maksumus on kõrge.
3. Hooldus on keerulisem.
B. asünkroonmootorite eelised ja puudused
Eelised:
1. Rootori ei pea olema ühendatud teiste energiaallikatega.
2. lihtne struktuur, kerge kaal ja odavad kulud.
3. Lihtne hooldus.
Puudused:
1. Reaktiivne võimsus tuleb tõmmata elektrivõrgust, mis halvendab elektrivõrgu kvaliteeti.
2. Rootori ja staatori vaheline õhuvahe on väike ning paigaldamine ja reguleerimine on ebamugav.
C. Mootorite valik
Mootorite valimine, mille nimivõimsus on 1000kW ja nimikiirus 300R/min, tuleks kindlaks määrata tehniliste ja majanduslike võrdluste põhjal vastavalt konkreetsetele tingimustele.
1. Veevalitsuses, kui paigaldatud maht on tavaliselt alla 800kW, eelistatakse asünkroonmootoreid ja kui paigaldatud maht on suurem kui 800kW, valitakse tavaliselt sünkroonmootorid.
2. Sünkroonsete mootorite ja asünkroonmootorite peamine erinevus on see, et rootoril on ergastus ja türistori ergastamise ekraan tuleb konfigureerida.
3. Minu riigi elektrivarustuse osakond näeb ette, et kasutaja toiteallika toitegur peab ulatuma 0,90 või kõrgemale. Sünkroonmootoritel on suur võimsus ja need võivad täita toiteallika nõudeid; Kuigi asünkroonmootoritel on väike võimsusega tegur ja nad ei vasta toiteallika nõuetele, on vaja reageerivat kompensatsiooni. Seetõttu peavad asünkroonmootoritega varustatud pumbajaamad üldiselt varustama reaktiivsete kompensatsioonide ekraanidega.
4. Sünkroonmootorite struktuur on keerulisem kui asünkroonsete mootorite struktuur. Kui pumbajaama projekt peab arvesse võtma nii elektritootmist kui ka faasimodulatsiooni, tuleb valida sünkroonmootor.
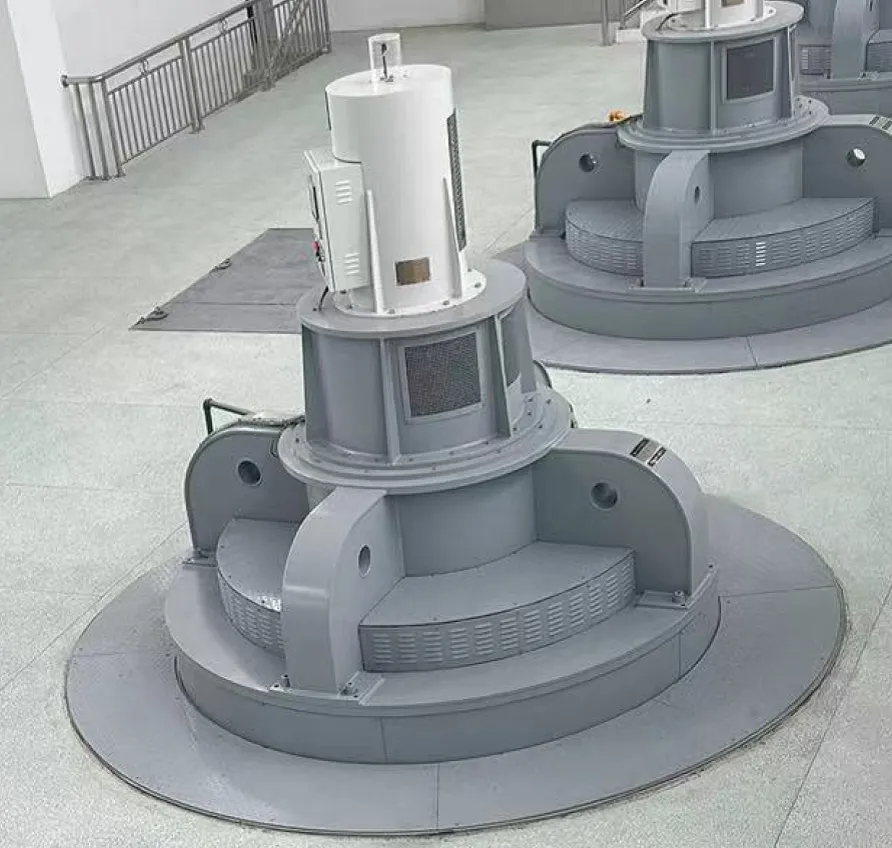
Täielikult reguleeritavaid telgseid segavoolu pumbasid kasutatakse laialdaseltvertikaalsed ühikud(ZLQ, HLQ, ZLQK),horisontaalsed (kaldu) ühikud(ZWQ, ZXQ, ZGQ) ja seda saab kasutada ka madala lifti ja suure läbimõõduga LP-ühikutes.
Postiaeg: 30.-30-2024